測力傳感器在機器人上的應用
測力傳感器原理
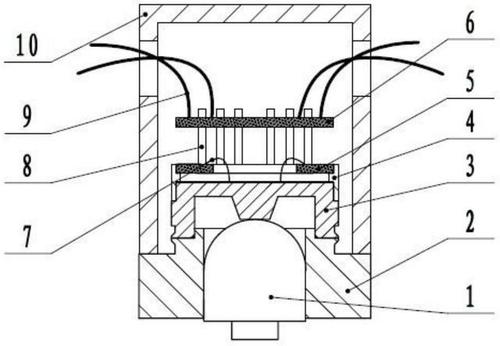
由一個或多個能在受力后產生形變的彈性體,和能感應這個形變量的電阻應變片組成的電橋電路(如惠斯登電橋),以及能把
電阻應變片固定粘貼在彈性體上并能傳導應變量的粘合劑和保護電子電路的密封膠等三大部分組成測力傳感器。
【聯系人〓>>>>>>楊工】
↓詳情可搜索“廣州◆蘭瑟電子”有限公司工作理念↓
聯系人電話:15322063181
穩定性的因素
影響測力傳感器穩定性的因素較多,歸納起來主要有:
1、測力傳感器的結構
2、彈性元件的金屬材料
3、機械加工與熱處理工藝
4、電阻應變計與應變粘結劑
5、制造工藝流程
6、電路補償與調整
7、防護與密封
8、穩定性處理
測力傳感器相關型號有:
tedea測力傳感器1042-3kg
tedea測力傳感器1042-5kg
tedea測力傳感器1042-7kg
tedea測力傳感器1042-10kg
tedea測力傳感器1042-15kg
tedea測力傳感器1042-20kg
測力傳感器在機器人上的應用
隨著工業技術的發展,機器人的應用越來越廣泛,其高效的工作效率,大大提升了企業的生產能力。然而工業機器人并不能很
好的檢測他們周圍環境,需與專業的儀器結合才能實現某些功能。隨著越來越多各種不同的傳感器引入到機器人上,使得機器
人更加敏感,更加智能化。在此簡單介紹下,測力傳感器在機器人中的5種應用:
1.恒力
力矩傳感器首次制造出來,是用于打磨、拋光等應用。由于這些應用都很難實現自動化,因為機器人需要某些力反饋來確定它
推動的力夠不夠。
2.目標定位
實際應用中,好多用戶通常認為,零部件定位和定量的唯一方法是使用視覺傳感器。但實際上這不是唯一的解決方案。不可否
認,視覺系統是零部件定位或量化的好方式,但采用力傳感器來尋找和檢測零部件也是可行的。
3.重復力
如果用戶正在考慮使用機器人做裝配任務,希望機器人能夠一遍又一遍重復同樣的任務。然而,裝配任務很難實現自動化的原
因之一,就是他們需要操作員進行力檢測。通過引入測力傳感器,可以感受到裝配過程中施加的外力。機器人在給手機裝上電
池時,需要施加非常精確的力量。由于這些部件很容易損壞,要想完好無損地組裝起來確實很困難。這就是為什么要設置一個
很低的力閾值,以防止部件錯位和損壞。
4.稱量東西
上圖的應用是把橙色和藍色的冰球分開。然而,我們采用的方式卻跟它們的顏色沒有任何關系。實際上,跟他們的重量有關。
橙色冰球比藍色冰球重一些,根據重量的不同,傳感器可以將它們區分開來。
5.手動引導
大部分協作機器人都是通過使用內置測力傳感器來實現手動引導的,但傳統的工業機器人并沒有內置這種類型的傳感器。這就
是為什么傳統工業機器人需要一個測力傳感器。有了它,你就可以手動引導示教機器人,而不需要使用示教器。只要一個測力
傳感器,就可以通過設定機器人的起點和終點,以及中間的線性軌跡,完成機器人的示教。
更多傳感器資料如下:
load cell_稱重傳感器
微型傳感器的結構和原理詳細介紹
梅特勒.托利多load cell_稱重傳感器
拉壓力傳感器工作原理及安裝注意事項
美國Celtron微型傳感器的結構和原理詳細介紹
|